Quando o assunto é automação industrial, controladores de processo são equipamentos responsáveis pelo controle de processo industrial ou de parte dele através de algoritmos de controle específicos, como PID, lógica fuzzy ou redes neurais. Também podem ser qualquer tipo de equipamentos programável capaz de executar algoritmos lógicos e matemáticos.
Os controladores de processos podem ser classificados como clássicos ou avançados. Com base nestas duas classificações, temos que controladores PID, controle em cascata e feedforward são considerados controladores clássicos e os controladores adaptativos, preditivos, ótimo, não linear e inteligentes são classificados como controladores avançados.
O controlador Proporcional-Integral-derivativo, ou PID, é um controlador de malha fechada que combina as ações proporcionais, integrativas e derivativas. Seu objetivo é somar as vantagens destas três diferentes ações para melhorar o desempenho do sistema como um todo. É considerado um sistema em malha fechada, pois já uma realimentação do sinal permitindo o controlador fazer a correção do erro e ajustando o sistema cada vez mais ao estado desejado.
Controle proporcional (P)
Para qualquer que seja o mecanismo, pode-se dizer que o controlador proporcional é basicamente um amplificador de ganho ajustável. Ele fornece uma relação linear fixa entre o valor da variável controlada (por exemplo: temperatura) e o valor que o atuador de controle pode fornecer, ou seja, a ação corretiva que é produzida por este mecanismo é proporcional ao valor do desvio (erro), ajudando a minimizar o erro.
Ao utilizar um controlador do tipo proporcional é possível especificar apenas um parâmetro no projeto. Opta-se pelo tempo de subida, overshoot ou tempo de estabilização adequados. Para especificar mais de um parâmetro simultaneamente, deve-se utilizar um controlador do tipo PI, PD ou PID, conforme o caso.
- Matematicamente temos:
MV(t) = Kp . E(t)
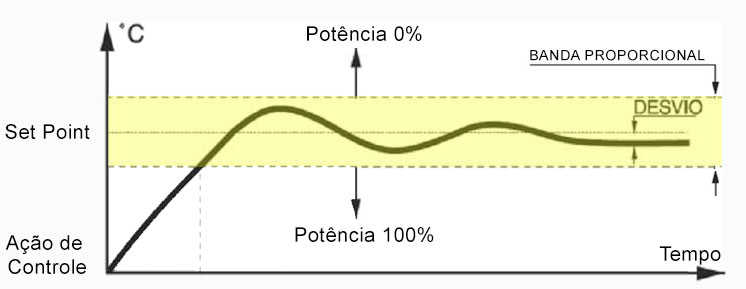
Figura 1 – Exemplo gráfico de ação de controle proporcional.
Controle integral (I)
O mecanismo de controle integral atua no processo ao longo do tempo enquanto existir um erro, ou seja, enquanto o valor desejado for diferente do valor medido. O controle integral, como o nome sugere, integra (soma) o sinal de correção ao longo do tempo. Isto o torna mais lento que a ação proporcional, porém elimina o erro completamente. Na prática, o controle integral geralmente é utilizado associado ao controle proporcional formando o controle proporcional-integral, ou Controlador PI.
- Matematicamente temos:
MV(t) = Ki . ∫E(t) . dt
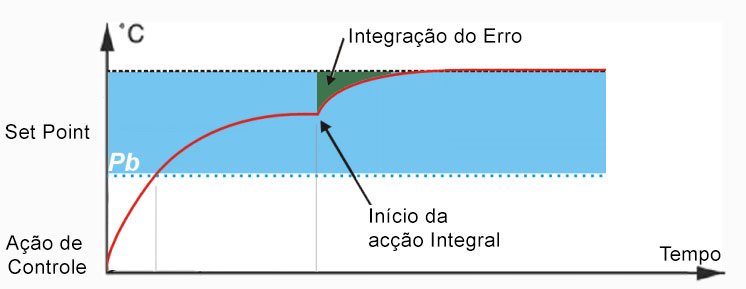
Figura 2 – Exemplo gráfico de ação de controle Integral.
Controle derivativo (D)
A ação derivativa atua como um controle para correção antecipada do erro. Pode-se dizer que no instante em que o desvio tende a acontecer ela fornece uma correção de forma a prevenir o sistema do aumento do desvio, diminuindo assim o tempo de resposta à correção do erro e reduzindo a oscilação do sistema.
A ação derivativa pode ser associada a ação proporcional, resultando num controlador PD. Esta ação possibilita uma correção antecipada de um desvio que ainda não aconteceu, também conhecida como supercorreção.
- Matematicamente temos:
MV(t) = Kd . ( dE(t) )/dt
Controladores PID
Conforme você já deve ter notado, os controladores PID são nada mais do que a associação dos controladores visto acima. Associando a técnica de controle proporcional (P), com a eliminação do erro do controle integral (I) e com a redução de oscilações do controle derivativo (D), temos como resultado um dos tipos de controle de malha fechada mais sofisticados e um dos mais utilizados na automação industrial.
A ação de controle PID consiste em calcular um valor de atuação sobre o processo a partir das informações do valor desejado e do valor atual (valor medido) da variável do processo. Esse valor de atuação é transformado em um sinal adequado ao atuador do processo (válvula, motor, relé, etc.) e deve garantir um controle estável e preciso.
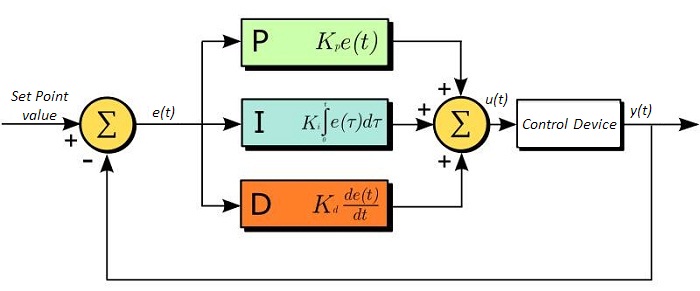
Figura 3 – Fluxo de processo de um controlador PID.
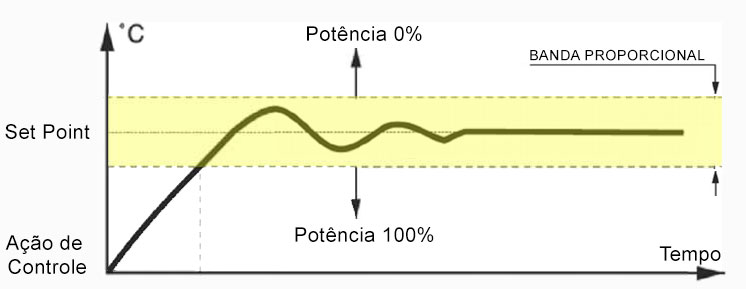
Figura 4 – Exemplo gráfico de ação de controlador PID.
- Matematicamente temos:

Onde Kp, Ki e Kd são os ganhos das parcelas P, I e D e definem a intensidade de cada ação.
Quando temos processos onde o tempo morto do sistema é muito elevado, ou seja, o intervalo entre o instante em que o sistema sofre uma variação qualquer e o instante em que esta variação começa a ser detectada pelo sensor é da ordem de 2 minutos ou retarda, são difíceis de controlar utilizando ações de controle proporcional com ação integral (PI) ou proporcional com ação derivativa (PD). Assim como, processos que tenham a banda proporcional extremamente ampla e onde o tempo de reajuste é bastante grande. Logo, neste casos, a fim de evitar oscilações pode-se obter melhores resultado utilizando controladores PID.
A associação das três ações de controle permite obter um tipo de controle que reúne todas as vantagens individuais de cada um deles e, por isto, virtualmente ela pode ser utilizada para controle de qualquer condição do processo. Na prática, no entanto, esta associação é normalmente utilizada em processo com resposta lenta e sem muito ruído, tal como ocorre na maioria dos controles de temperatura.
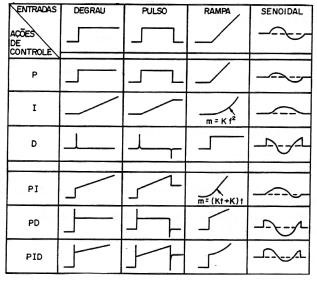 Figura 5 – Quadro comparativo entre sinais de entrada e Ações de Controle.
Figura 5 – Quadro comparativo entre sinais de entrada e Ações de Controle.